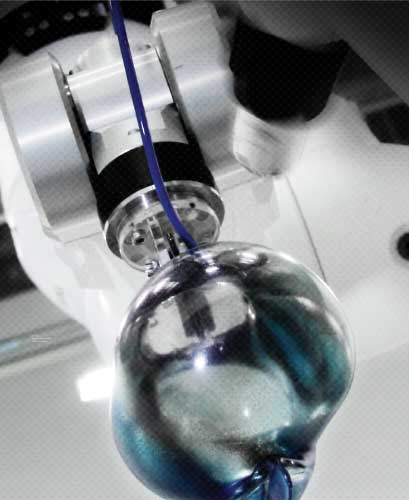
How to use robots for mass customized production?
sPHYSICAL.
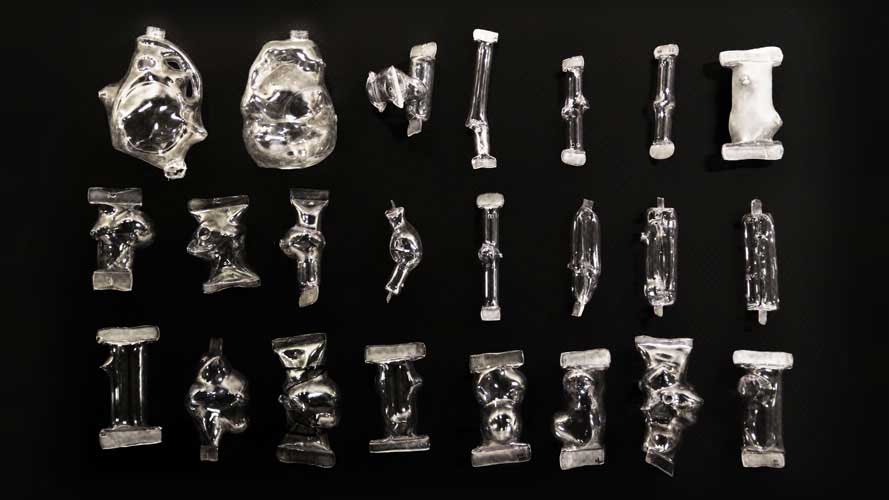
This project subsists on the translational discrepancies that arise during interplay between an excessively controlled but exceedingly irresolute digital environment and its materialization into the reality of physical space. sPhysical seeks the epitome of synthesizing digital tools with physical expression by re-conceptualizing material design processes and applications in the field of architecture. The problem of materialization exists as the limitation of digital control and resolution. Matter and form are subjugated through a logic of rigging, a concept derived from and informed by robotic motion-control, and embedded with a certain propensity and agency. A design methodology, one that realizes the potential of designed properties, will be achieved through the conceptualization of rigging matter and form.
focus: mass customization with robots, translational discrepancies
team: Erin Besler, Siim Tuksam, Eugen Kosgoron,
material: thermoplastics
program: research in robotic fabrication
date: 2011 winter term in Studio Testa, Sci-Arc, Los Angeles